|
Tracore
|
#include <ObjectDataBox.h>
Public Member Functions | |
| ObjectDataBox (size_t frame_index, cv::Point2d center, cv::Point2d size) | |
| cv::Point2d | GetSize () const |
| virtual double | CompareTo (ObjectDataPtr obj) const override |
| virtual bool | IsWithinConstraints (ObjectDataPtr obj, std::unordered_map< std::string, double > &constraints) const override |
| virtual ObjectDataPtr | Interpolate (ObjectDataPtr obj, double fraction) const override |
| virtual void | Visualize (cv::Mat &image, cv::Scalar &color) const override |
| virtual std::string | ToString (char delimiter) const override |
 Public Member Functions inherited from core::ObjectData2D Public Member Functions inherited from core::ObjectData2D | |
| ObjectData2D (size_t frame_index, cv::Point2d position) | |
| void | SetTemporalWeight (double weight) |
| void | SetSpatialWeight (double weight) |
| cv::Point2d | GetPosition () const |
| double | GetTemporalWeight () const |
| double | GetSpatialWeight () const |
| Public Member Functions inherited from core::ObjectData | |
| ObjectData () | |
| ObjectData (std::size_t frame_index) | |
| std::size_t | GetFrameIndex () const |
| void | SetFrameIndex (size_t index) |
| void | SetDetectionScore (double score) |
| double | GetDetectionScore () const |
| bool | IsVirtual () const |
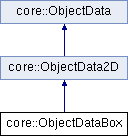
Class for storing an object detection with an bounding box.
| core::ObjectDataBox::ObjectDataBox | ( | size_t | frame_index, |
| cv::Point2d | center, | ||
| cv::Point2d | size | ||
| ) |
Creates a new detection with an bounding box of the given size.
| frame_index | The frame index of the detection |
| center | The center of the bounding box |
| size | The size of the bounding box |
|
overridevirtual |
Compares this object with the given object.
| obj | A pointer to the object to compare this object to |
Reimplemented from core::ObjectData2D.
| cv::Point2d core::ObjectDataBox::GetSize | ( | ) | const |
Gets the size of the bounding box.
|
overridevirtual |
Linearly interpolates between this and the given object. Creates a new object to fit between the two objects.
| obj | A pointer to the target object |
| fraction | Describes where the interpolation should be done. A fraction of zero is a clone of this object, a fraction of one is a clone of the target object. |
Reimplemented from core::ObjectData2D.
|
overridevirtual |
Checks if the difference between this object and the specified object is within the constraints specified. The difference is calculated for each constraint separately.
| obj | The object to get the difference to |
| constraints | The constraints to assure |
Reimplemented from core::ObjectData2D.
|
overridevirtual |
Returns a string representing the values of this object data.
| delimiter | The delimiter used to separate values |
Reimplemented from core::ObjectData2D.
|
overridevirtual |
Visualizes the object in the given image with the given color. This method does nothing, it needs to be overwritten to visualize something.
| image | The image to write into |
| color | The color to use |
Reimplemented from core::ObjectData2D.
 1.8.12
1.8.12

